
Pete Covert
Solaris Redesign
 |
|
After 15 months and 6 competitions, I felt it was time to re-build Solaris. The original broke new ground for us in the 12 pound class. I believe it was the first 12 pounder to use a brushless motor, and it was our first bot to use belts in the drive system He performed much better then expected, finishing in the top three spots in 5 out of the 6 competitions he attended. He also spawned a few imitators, which also fared well.
In fact, Ted and I held off on a build reports for a while due to the fact that Solaris was copied so closely. The downside of posting detailed build reports became obvious. Facing a clone of your own bot, or hearing people complain about "another drum bot" when you enter the box is a bit unsettling. However, getting into the sport we loved being able to read about how Hazard was built, the information Christian had gathered while building his bots, and the Colson research Jason did. This sport wouldn't be where it is today if these people (and many others) hadn't shared some of their secrets. So hopefully you can learn something from this web page, but at the same time we hope you don't use it as a template to build yet another clone bot. Building a clone will only stifle the amount of information freely available.
Going into the design phase, I had three major design goals in mind:
Notably missing was any attempt to improve invertability. The original Solaris was pretty vulnerable upside down. Derek Zahn had come up with one way to solve this problem by using a more complex drive system, incorporating 3 wheels per side. Greg Dabkowski solved this problem by using a large front wheel. While both systems work well, I felt that borrowing either idea would make my bot look too much like theirs. Plus, both methods take up weight that I'd rather use elsewhere. I'd stick with the Cosmos credo of sacrificing inverted drivability for right-side-up nastiness. As long as I could move while inverted, I'd be satisfied. Although I've lost a fair number of matches due to invertability issues, I've also really enjoyed the fights where I got inverted, was losing the match, then got right-side-up again to kick some ass in the final minute. It adds a bit of drama.
The design phase took much longer then I expected. The original Solaris kept doing well, without taking that much damage. It was hard to start on a new bot when you have one in great working order that is still performing well. The original bot also evolved over time, allowing me to try new ideas without re-building the entire bot. Solaris 1 became a test bed for ideas I wanted to use in the new Solaris. This helped weed out a few of the ideas that didn't work so well, and resulted in a better final design of Solaris 2. If you build a new bot each time you want to try out new ideas, you're going to quickly get tired of building.
Making the Drum Better
 |  |
Between Solaris and Helios, Ted and I had been trying to come up with ideas on making the drums last longer. Making a drum can take a few days of effort, and we eventually got to the point where we were going through a drum per competition. The main issue was the ends of the teeth breaking off. Since the retaining screws on these were tapped into aluminum instead of steel, they tended to strip. Also, the groove in the drum tended to smear the most on the ends. Both of these factors led to teeth breaking off at the ends. |
| With Helios we tried two different methods to improve the drum: The Uber-Nut (tm) and the end ribs. The uber-nut experiment was a keeper, it kept the teeth attached to the drum well, and aided in swapping ruined teeth out. The rib idea was effective, but required much more work and thicker drum material. It also made the end of the teeth less effective, since the rib effectively hid that part of the tooth. |  |  |
|
| For Solaris 2 I wanted to try a new idea that should solve the tooth-end problem, and make the drum meaner in general. I designed a circular steel blade that would fit over part of the end cap. This design came about after admiring Derek Zahn's innovative weapon on Dandelion. The new blade would bolt into the end cap, and slide into slots in the drum. It had two protruding blades that stood significantly higher the drum teeth. The hope was that anything that I hit near the end of the drum would hit the blade instead of the tooth, thus preventing the ends of the teeth from breaking. Anything I hit near the center of the drum would hit the teeth like the older drums. |



| We tried this design out on the original Solaris, and eventually Helios. The results were mixed. We put a lot of nice holes in other bots, but at the same time we broke a lot of blades. It also complicated the making of the drum body and end-caps considerably, a task we were already tired of. | 
|
The blades themselves were waterjet cut out of S7 or A2, and required quite a bit of material since they had such a large diameter. They were complex enough that we couldn't justify making them on our equipment. Farming the work out got expensive quickly, $40 for the raw material, $40 for the waterjetting, and $30 for the heat treating for a typical batch of blades.
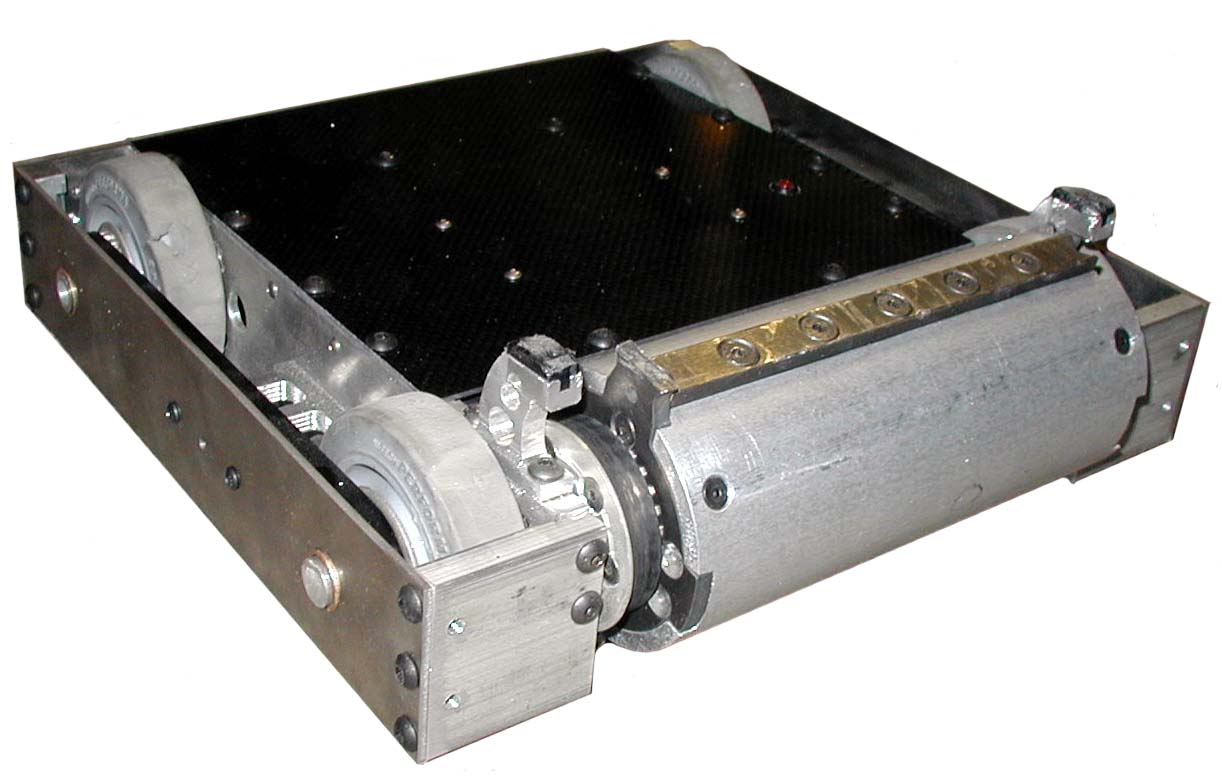
 |  | By the time I got to actually building the drum on Solaris 2, I had a slightly different design in mind. Instead of circular blades, I used rectangular blades that attached to the inside of the end cap, rather than the outside. This simplified the end caps significantly, and in theory made the drum body simpler to make as well. Since the blades were rectangular in nature I could cut the blades on my mill, use less material, and save some money. I also hoped that they'd be more resilient to breakage then the originals, but I wouldn't know until I tried them out. |
| Also, I decided to make the drum radically larger in diameter. I chose 5" from end-of-blade to end-of-blade, which is just a bit smaller then Helios's drum. I hoped putting something this ridiculously large in a 12 pounder would help Solaris stand out from the rest of the nasty hobbyweights. Of course, I also hoped that the larger drum would allow me to really dish out the hits. |  | 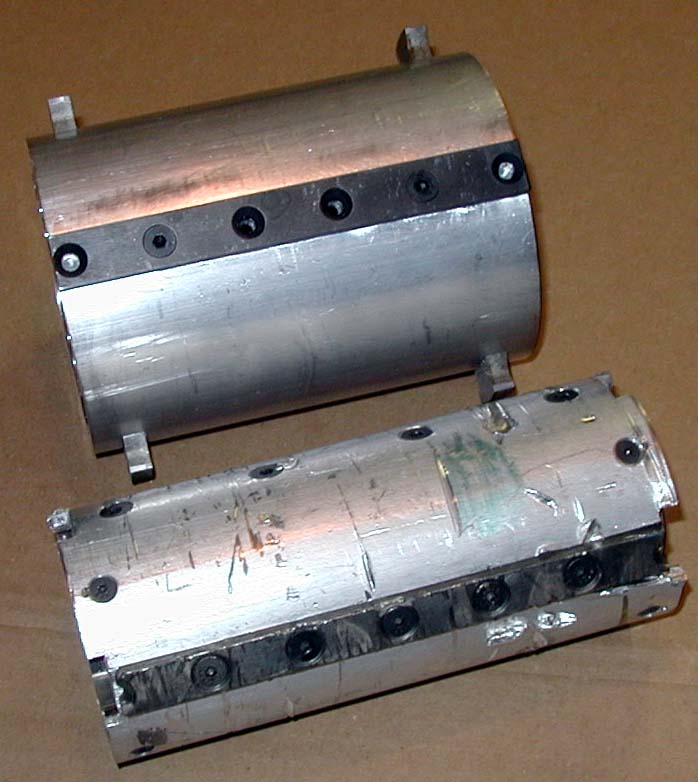
|
Improving the Armor
 | 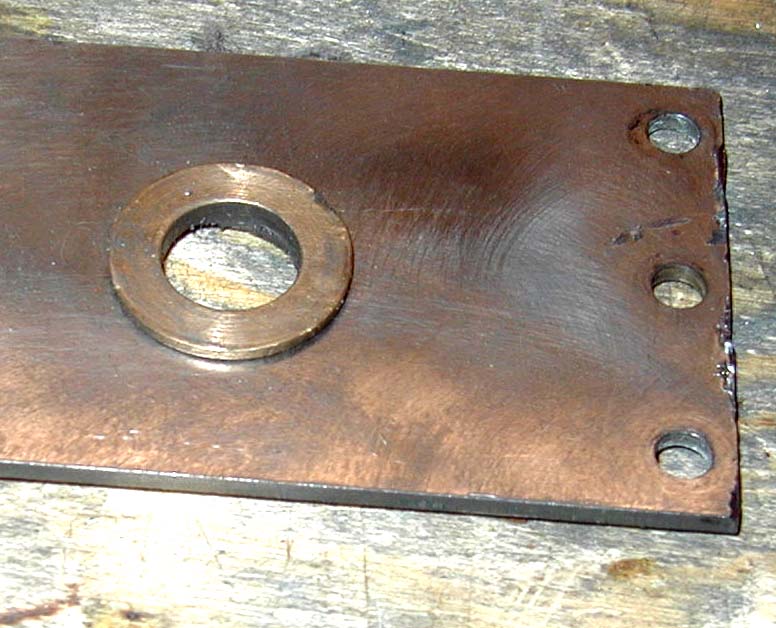 |
I'd had a chance to experiment with titanium armor on the first Solaris. Since I was using corner blocks originally, it was fairly simple to bolt on some titanium rather then the 3/16" aluminum I had originally used. While this worked well, there were a couple of issues. The bronze sleeve bearings I used for the axles were difficult to attach to the thin titanium. Also the .08" Ti seemed a bit too flexible for my tastes. |
| I needed to solve these issues, and I also wanted to try to slope all four sides of the bot. The hope here was that this would make other vertical spinners a lot less effective against me. I thought that this would result in many more glancing blows, rather then blows that might grab me and flip me. This design feature proved very difficult to design and implement. It was very tempting to drop it at several points, but I hoped that the effort would pay off. | 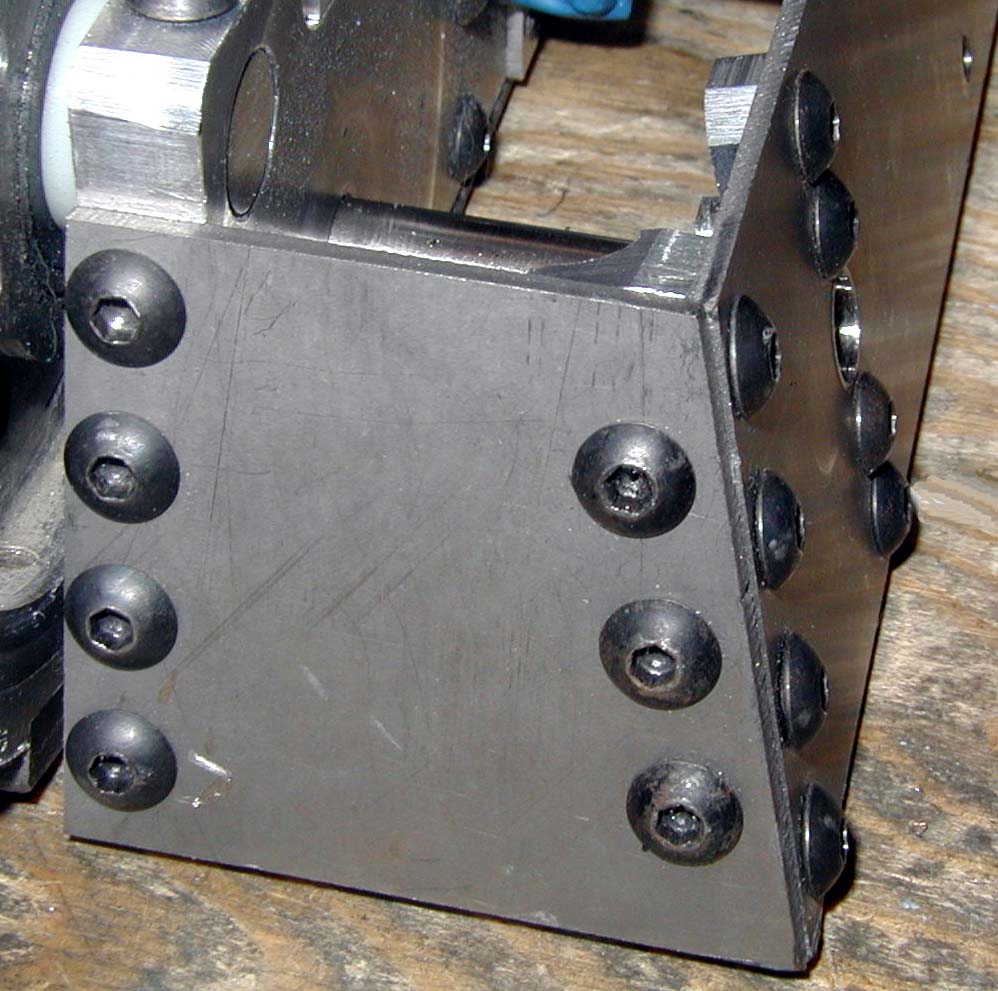 | 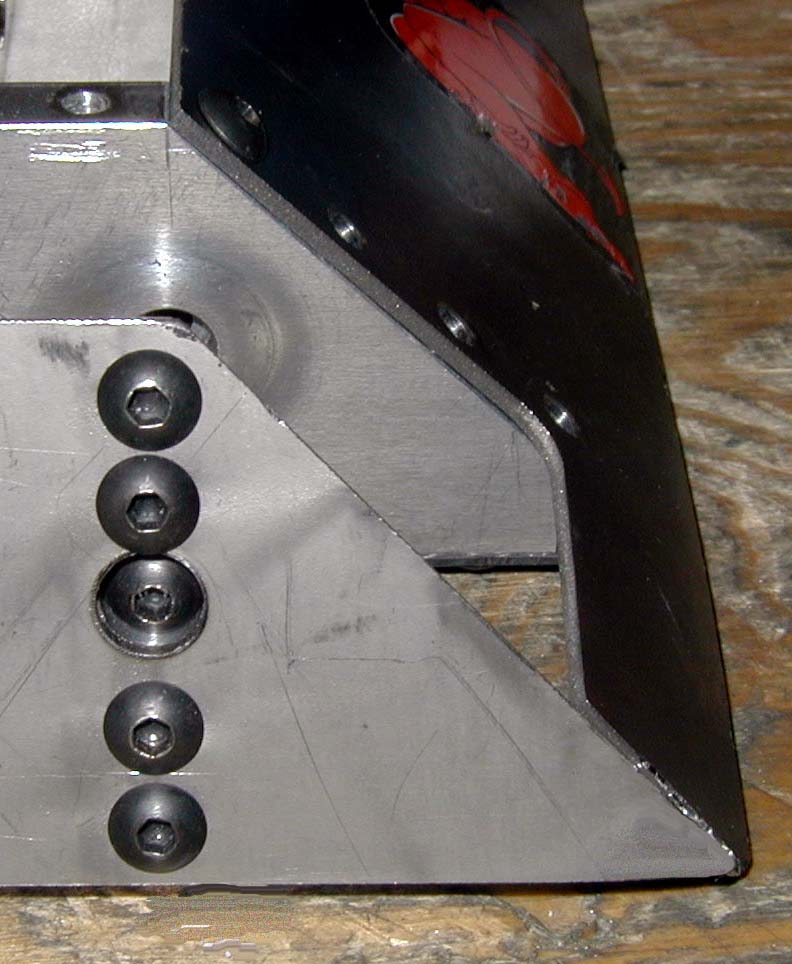
|
After several attempts at CADing the sloped sides, I quickly realized that you couldn't slope them too much, or else the footprint of the bot got huge. Also, you started using considerable material for the sloped sides. Attaching the outer armor was going to be tricky. Not only would it involve several strangely angled corner blocks, I also wanted to attach it more rigidly then I had previously. I struggled over several designs, but none seemed to be "right".
|
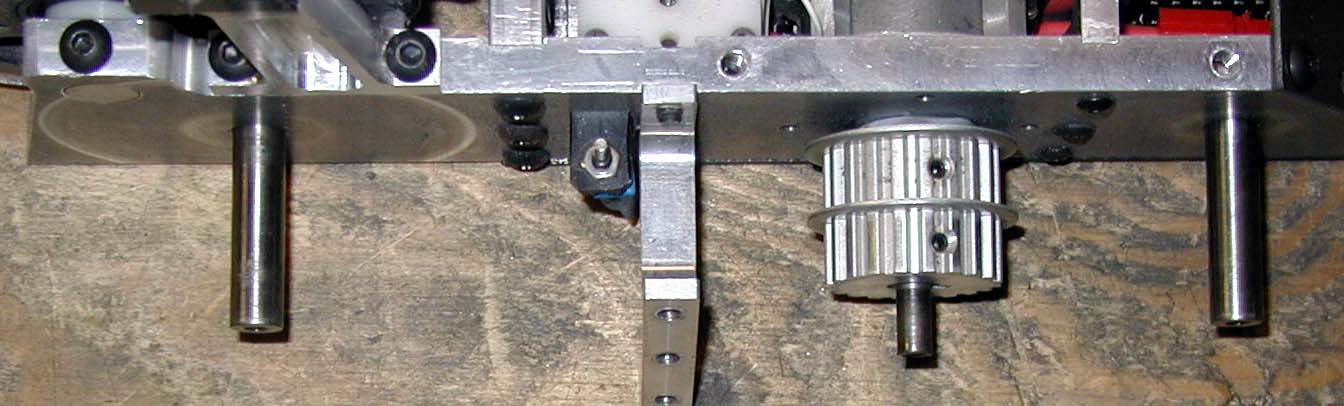
| Like many of the good ideas that make it into our bots, the solution to the attachment issue came out of a long conversation with Ted. We'd just finished up rebuilding Helios, and were discussing possible improvements for the outer rails. It dawned on me during this conversation that there really was no need for rotating "live" axles for the wheels. If I was to incorporate non-rotating "dead" axles into the design, and have the wheels spin on them, I could use the axles themselves as another link connecting the inner frame to the outer armor. This made the outer shell of the bot much stiffer. This was probably the most important design change in the new bot. As time went by, more advantages of using dead axles became evident. |
{kind=link}
Incorporating Magnets
I hoped that increasing the virtual weight of the bot would help me in several ways. Being more firmly attached to the ground should make me flip over less often, help me win pushing matches, and improve drivability, especially while inverted.
| Gear reduction was an issue. Ted had found some top secret 29:1 reduction planetary gearboxes. They were meant for relatively small motors, and didn't have a lot of fight time under their belt. I recalled reading about a gearbox mod Eric Scott had done using a Harbor Freight drill. I decided to try something similar using a Handiworks gearbox and a torquier motor. I built a dummy mount, to test out the idea, and it seemed to work well. |  |  | 
|
 | The other advantage of modifying the handiwork gearbox was that it made the drive system considerably smaller, and I saved a bit of weight as well. On the other hand, it introduced a lot of uncertainty, since we hadn't done this before, and it relied pretty heavily on accurately machined parts. I decided that the advantages outweighed the risks. |
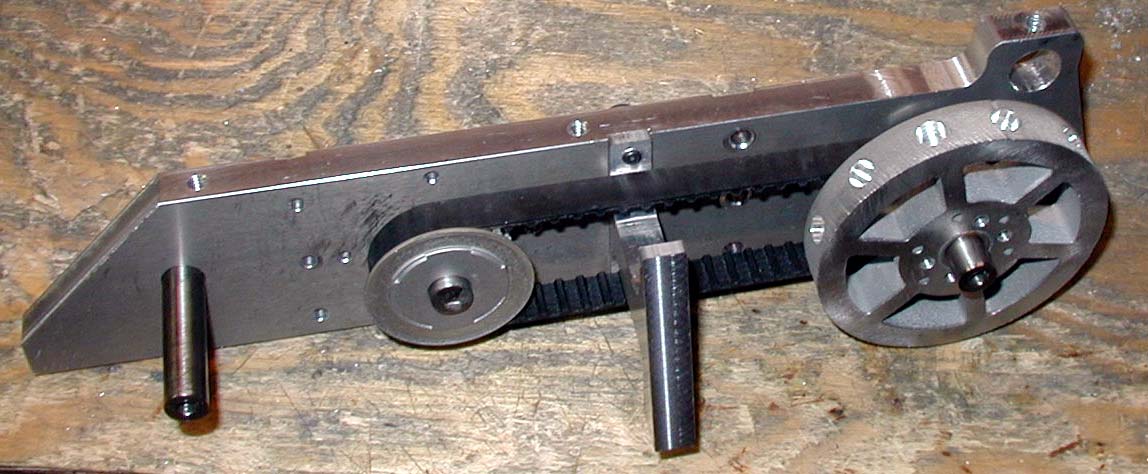
| Borrowing one of Ted's design ideas from Helios, I also decided to drive both sets of wheels indirectly. If needed, I could use this to further increase the reduction used in the drive system. This also allowed me to use the dead axle idea mentioned above. The down side of this method is that it requires more pulleys and more belts, adding weight and complexity. | 
|
Implementation details
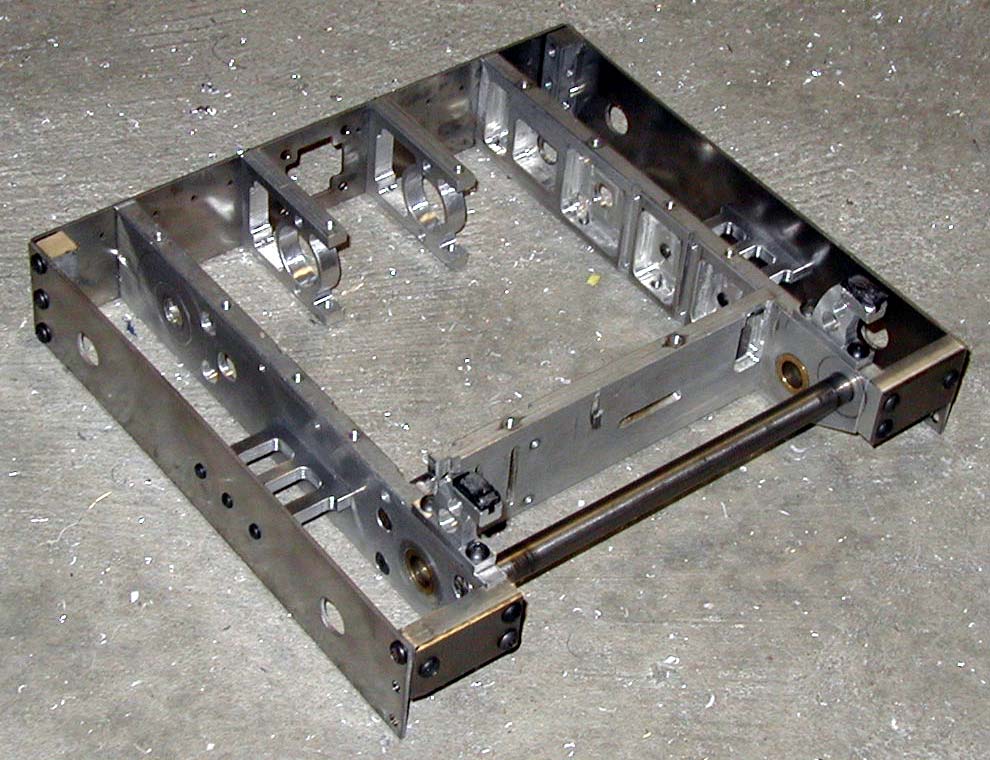
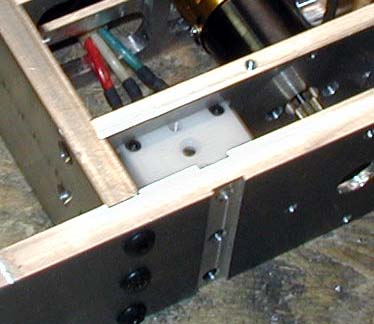
 |  |  | I decided to use stronger aluminum, and to use much less polycarb in the rebuild. The frame used a lot of 3/8" 2024, and 1/4" 7075. Almost all of it was hack-sawed out of plate, and milled to the right size. |
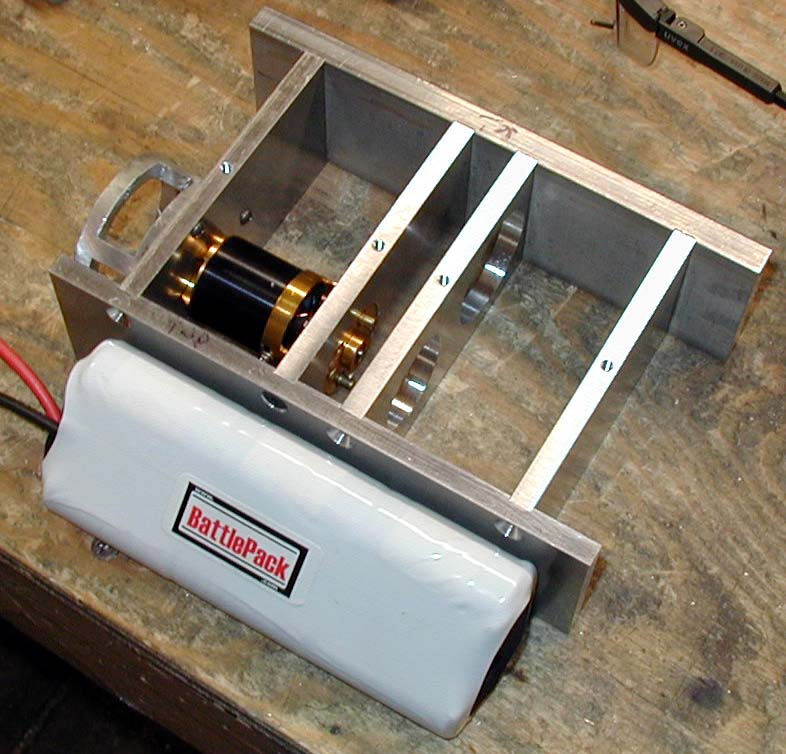
| I was really happy with the final design of the frame. Everything was mounted well, and in appropriate places. With the drive motors placed centrally in the bot, I was able to put the custom made Battlepacks in the very rear of the bot, hopefully helping the weight distribution and improving invertability. I realized that 9 3300 mAh NimH cells could be configured to give me a good 45 degree angle, which fit well into the angled design of the rear. | 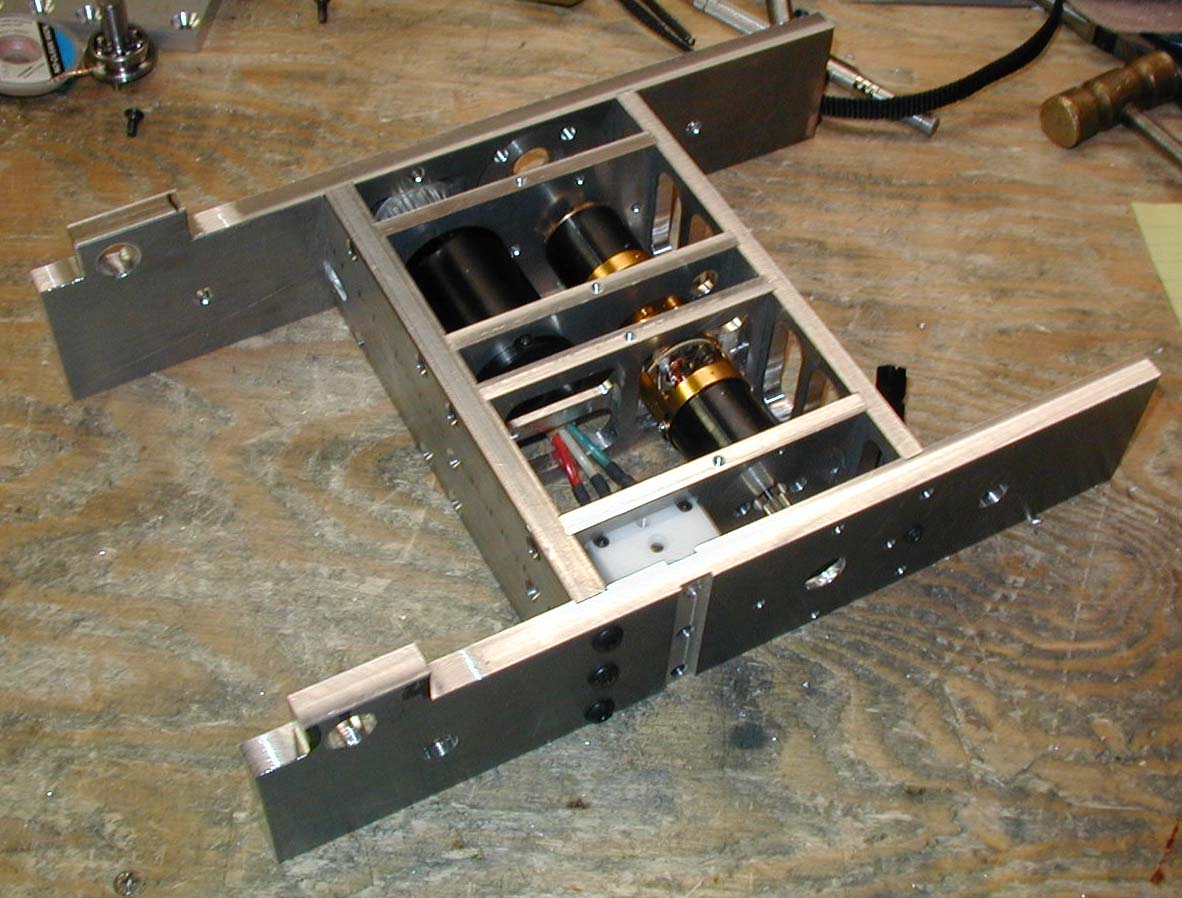 |  | 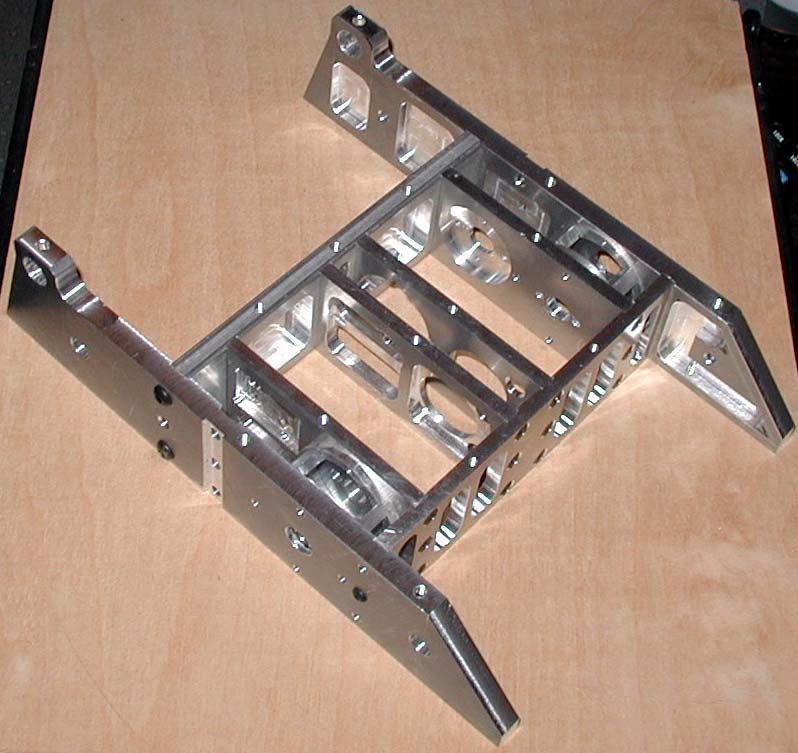
|
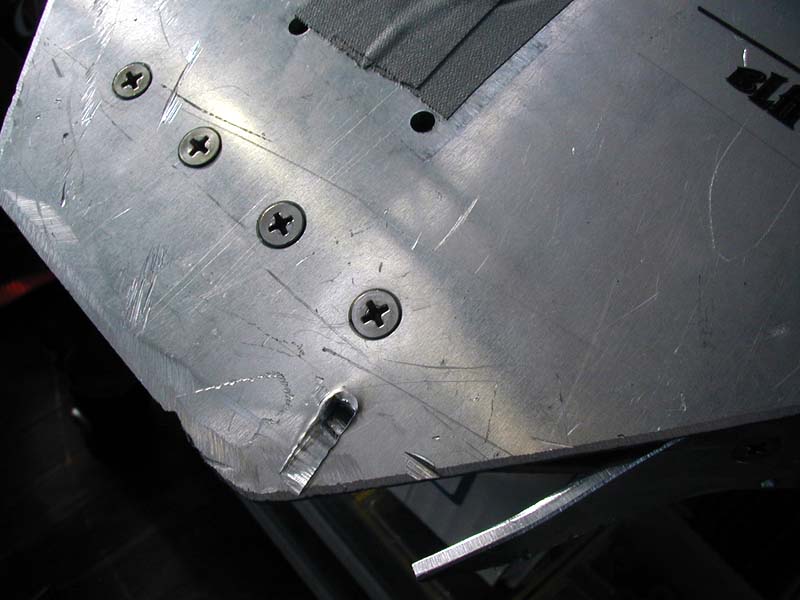
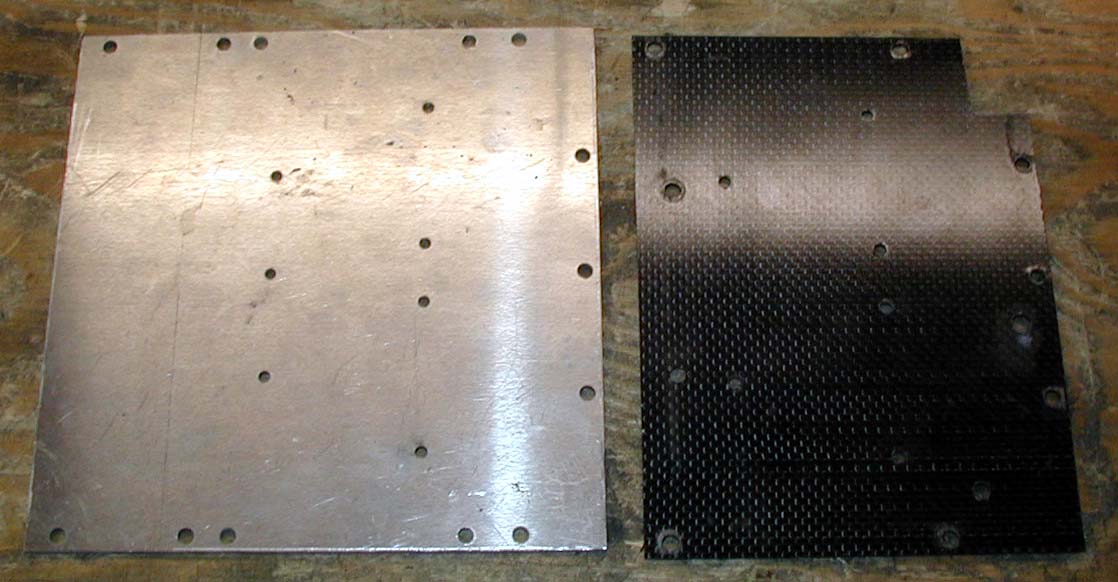 | I once again used carbon fiber for the top and base plate. I borrowed one of Greg Dabkowski's ideas, and had a template water-jetted from some thin aluminum, so I could easily drill the holes in the proper place. I made sure that the top and base plates had the same hole pattern, so I could use the same template for both. |
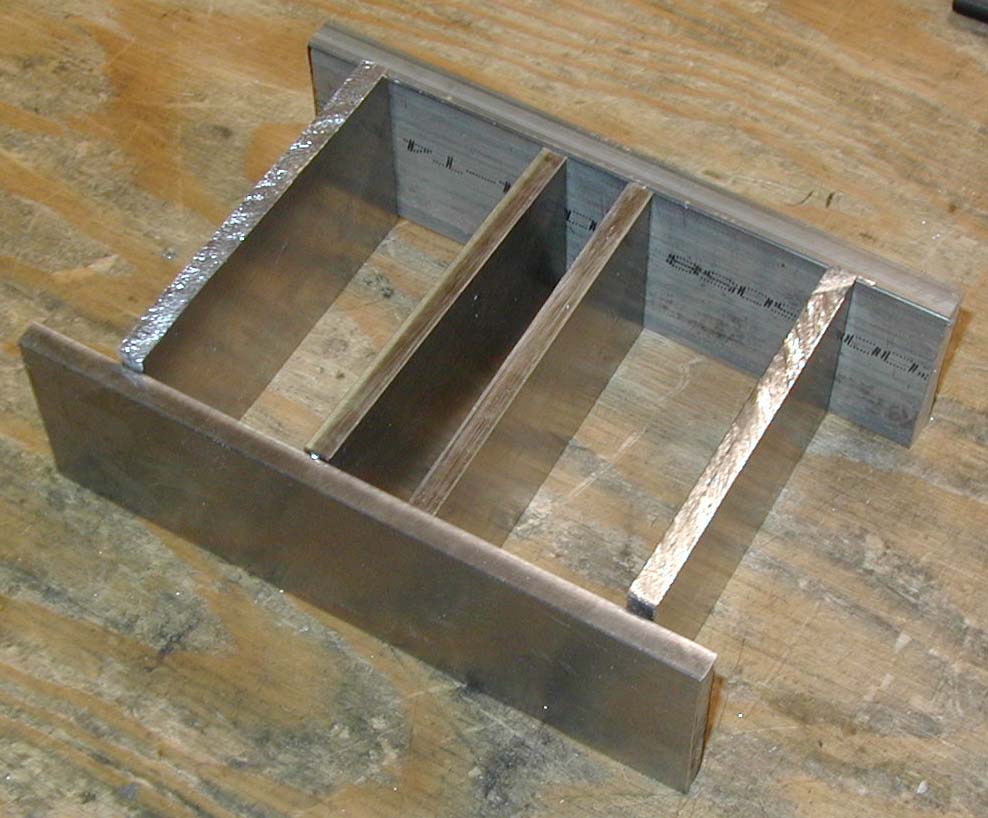
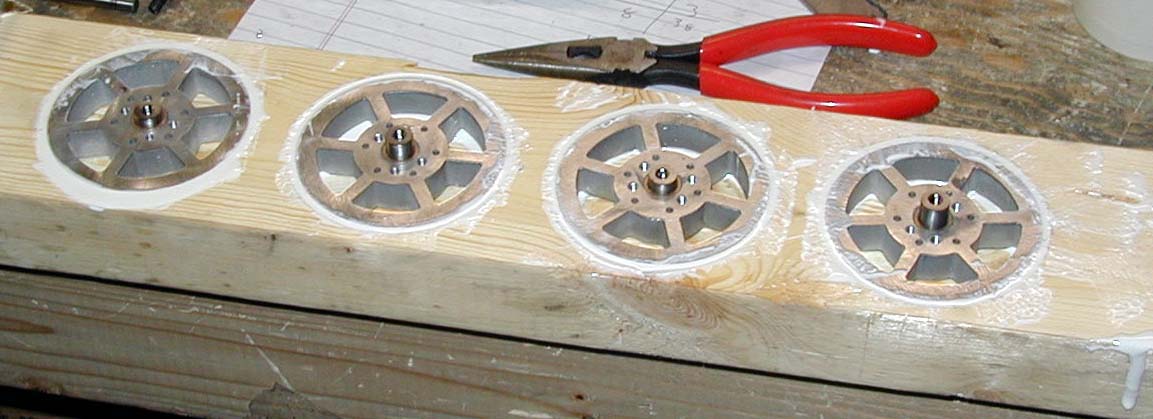
To keep the bot as small as I could, I decided to make custom wheels. I had a lot of polyurethane left over from some experimental antweight wheels I made. I drew up some wheels, and had them waterjet cut out of aluminum. I then tried to make a mold for the tread out of a 2 X 4. This proved to be a waste of time, as the polyurethane stuck to the wood a lot better then it did to the aluminum wheel. I remade the mold out of UHMW, and that worked much better.


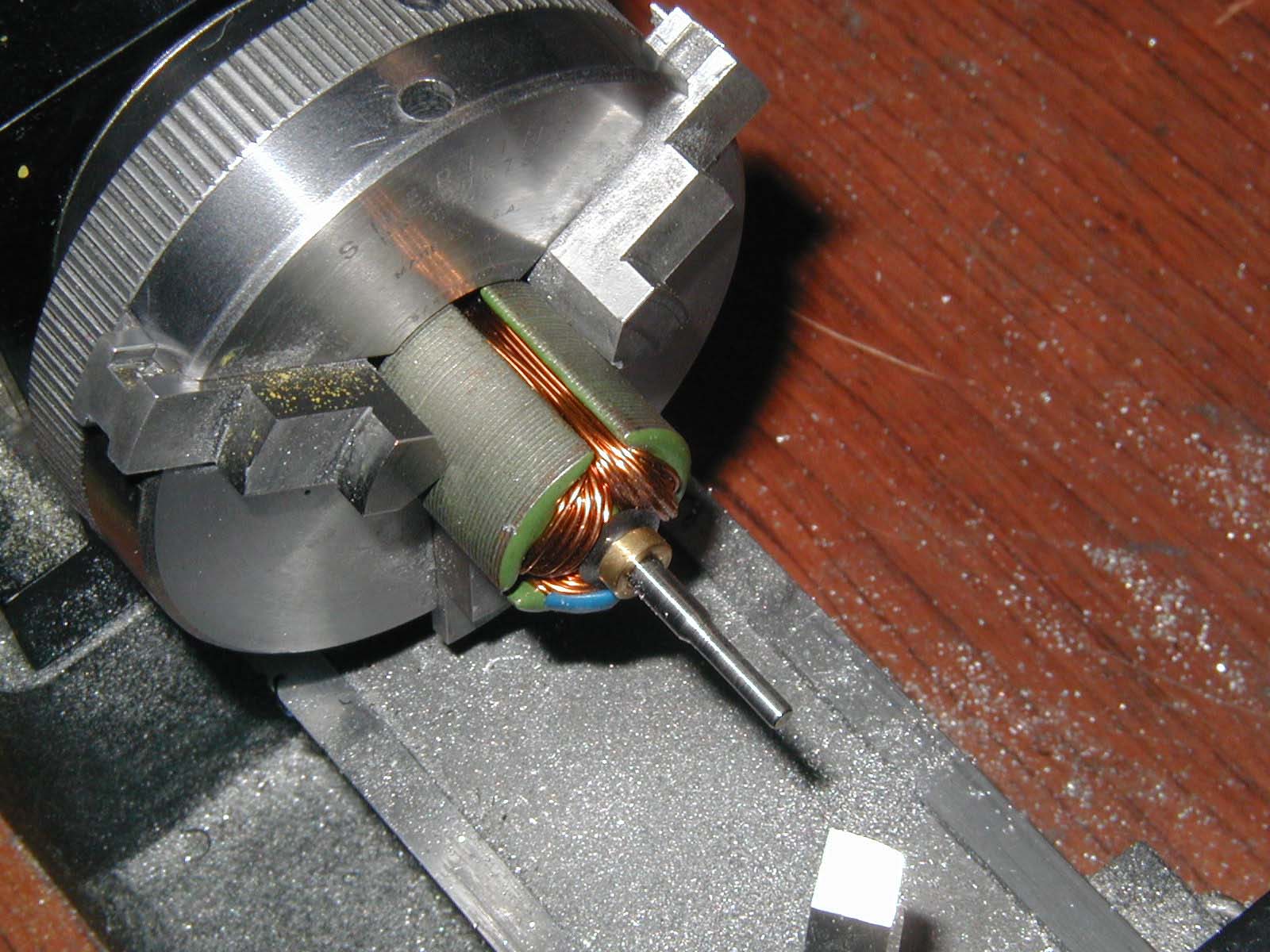
After looking at what was available, I chose the Wattage Cobalt 400 motors to mate with the modified Handiworks gearboxes. One of the main challenges here was mating the Handiwork pinion gear to the output shaft of the Wattage. In order to do this I turned down the output shaft to the proper 2.3mm diameter. I then press fit the pinion onto this, and then reassembled the motors. During this process I was amazed at the poor quality of the Wattage motors. They each seemed to be slightly different in size, and one was missing a critical non-conducting washer, which prevented the motor from working. I luckily caught it before trying to spin it up, and was able to resolve the problem before blowing up the motor.

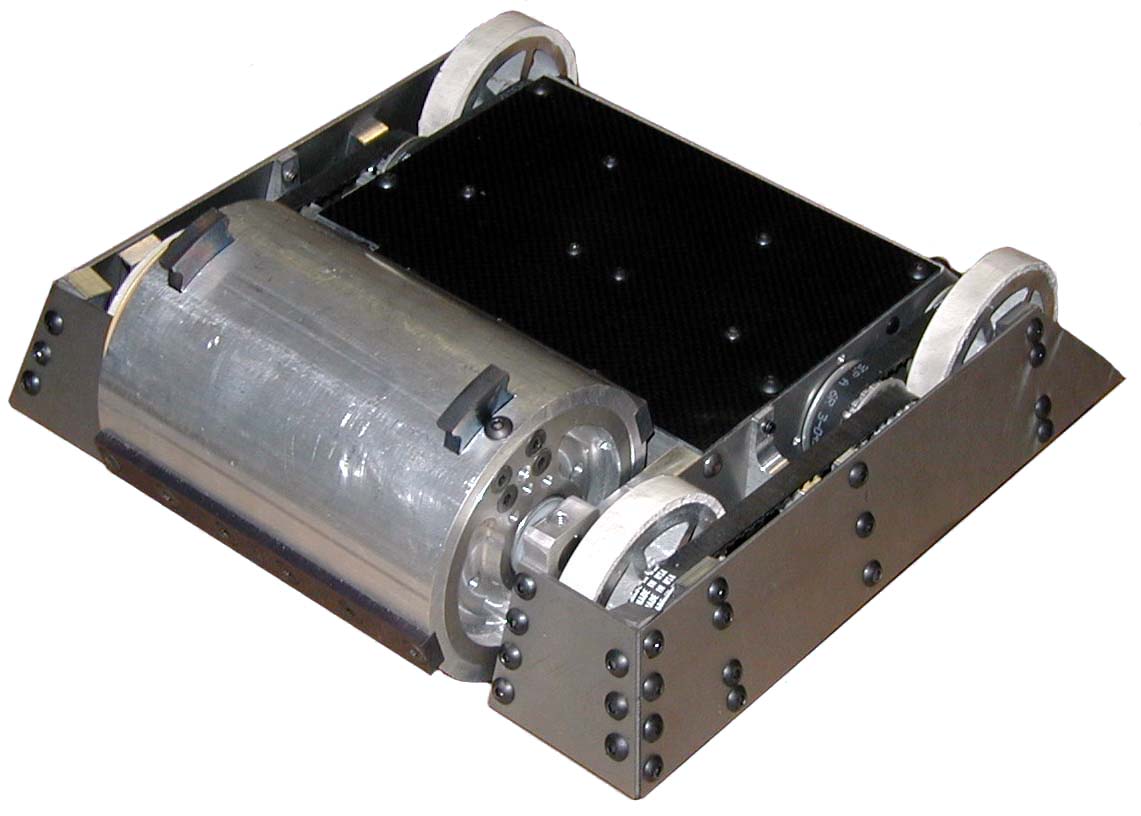
| Invertability was accomplished by adding a few standoffs, similar to my final design on the original Solaris. These had to be significantly taller, since the drum was so much larger. I improved upon the design of the originals, knowing a bit more about how to make things strong. |  | 
|
Building the drum proved to be a bit easier then the previous iteration of Solaris and Helios drums, but wasn't as easy as I hoped. The main trick was filing the blade slot square so that the blades would fit. I underestimated how much effort the manual filing would take. I also ended up having the blades waterjet cut, since we were getting a large batch done anyway. I also stuck with a .5" titanium drum axle, instead of making it larger.
 | I switched from a Anderson-based removable link to a Whyachi MS05 switch. The old Anderson powerpole link had caused probably 5 losses between Ted and I in the past. I felt a lot safer about not loosing power during a fight. However, I feel that these switches are overpriced, especially considering the additional $10 shipping charge. I imagine this will keep a lot of sub-light bots away from the switches. |
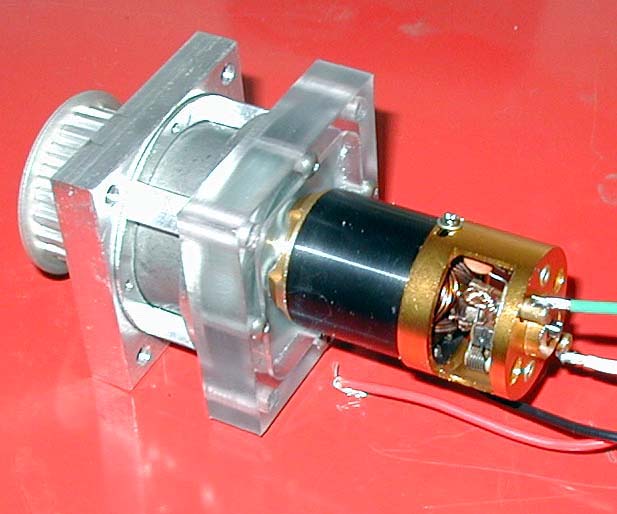
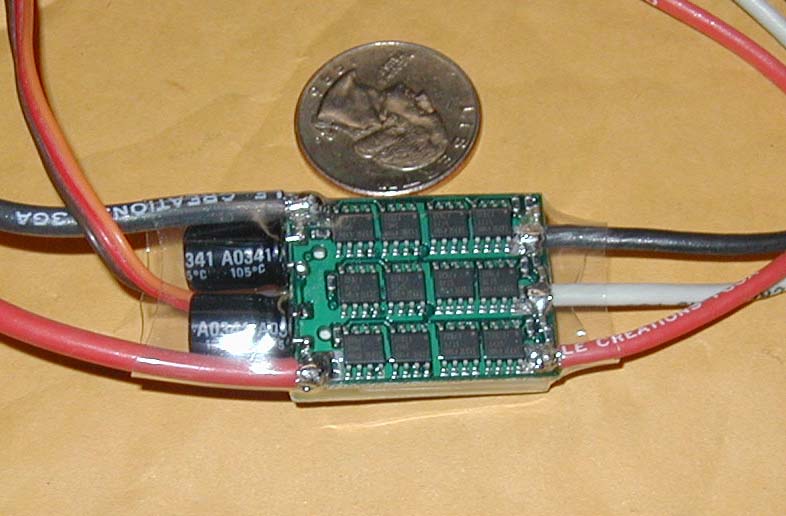
| I stuck with a brushless motor to power the weapon, and switched to a Castle Creations Phoenix 45 brushless ESC. This ESC is tiny compared to other similar controllers, had a good English manual, and worked great. I'd say it was my first positive experience with a brushless controller. |
|
 | Ted and I are lucky enough to know the guys over at Banebots. We've been beta testing their brushed ESCs in bots for quite a while now. I would have been hard pressed to find a commercially available ESC that would have fit in the tiny amount of space that I had available. When these things come to market they're going to sell like mad. More features, more current, and a smaller footprint are hard to argue with. Thanks Rick! |
Postmortem
I took Solaris to Nationals, and ended up going 3-2. Looking back, I can see a few things that went right and wrong with the bot. There are a few things I can't comment on yet, like the sloped armor, since they haven't really been put to the test yet.
What Went Wrong
Weight estimatesI didn't do formal weight estimates for the entire bot. I guessed that since it was smaller, but used extra weight here and there, I'd be ok. I ended up being about 8 ounces over when I finally got everything bolted together. This is pretty rough when you've already taken out as much weight as you felt was possible. I managed to remove the 8 ounces, but had to make sacrifices in order to do it, including not running with magnets or having a front wedge.
Custom wheels
The wheels I made were nice, but suffered from a few problems. They were much too heavy. Also, the polyurethane refused to stay on the wheels, causing the tread to bunch up which caused a few small driving issues. I switched the two rear wheels to some cheap-o Colson knockoffs at the last minute and saved 2 oz per wheel.
Original gearbox design
The Wattages are probably the wrong motor to mate with the Handiworks gearboxes. I had problems keeping the pinions on, although I believe that problem could be easily solved. The bigger issue is that the Wattages draw an insane amount of current to start spinning. You can see momentary spikes of 50 amps or more. The beta ESCs I was using could not handle that, and would shutdown in order to protect itself. I eventually swapped out to the "Long Can" speed 400s, and have had great luck with them. In theory I gave up some torque and speed, but I believe the reliability is probably much greater.
Drivability
Given the amazing gyro forces of the weapon, driving proved to be difficult. The bot likes to stand up on end when turning, which can be pretty unnerving. It may also make it easier for the opponent to flip me over. I thought I'd have the discipline to throttle back on the weapon so I could do a good job of driving, but found that the bloodlust was so strong that I almost always ran the weapon full throttle. Driving be damned!
What Went Right
New Drum/Blade DesignThe new drum held up surprisingly well. The new blade design looks like a keeper, as I have yet to break any blades. There is minimal smearing, even after some truly huge hits. The 1/2" titanium axle appears to be beefy enough, which is a relief. I had at least two truly massive hits during the competition, and everything held up well.
New Frame
Over the 6 month design phase, I iterated over the frame probably 10 times. I was very happy with how it end up in terms of layout, aesthetics, and strength. It gives this iteration of Solaris it's own style, while solving several difficult problems.
Completeness of design
Unlike the original Solaris, I made sure I had each piece completely designed before I started making it. This resulted in more accurate pieces, since I had to re-position them fewer times in the mill. This also sped up the building process (at the cost of more design time) since I could build straight through without having to run upstairs to design the next part.
Machining
When I made the original Solaris, it was the first bot I had made on my mill. I made an alarming number of errors, some of which were fairly serious. I had a lot of practice on the mill by the time I started on the new Solaris, and things went much more smoothly. This was a good thing, since I was under the gun time-wise for most of the project. It's amazing what a little practice will do.