To build a competitive lightweight class BattleBot. Build Progress: February March April May
After watching a few episodes of Battlebots and seeing several of the builders web sites, we gravitated toward a semi-wedge design. We wanted a simple design that would not be vulnerable to being flipped. In order to accomplish this we wanted to allow the bot to be driven upside down. Going beyond a simple wedge design, we opted to include a lifting arm. The arm would serve double duty as a clamping mechanism.
We decided to construct the frame using 1/2" square steel tubing. We felt that this would provide a excellent strength to weight ratio. Additionally, the tubular frame design would not cause radio interference, unlike a metallic sheet design.
For the armor, a fiberglass/Kevlar composite was chosen, again for the strength to weight ratio. Fiberglass is low cost and has a higher strength than Lexan. Kevlar would be used on the outer layers for protection against the kill saws. A nonmetallic armor was would allow us to have an internal antenna, avoiding radio interference problems (hopefully).
In order to provide adequate traction, we planned on using Colson wheels, due to their proven success with other well known bots. We decided to use a chain drive from the drive motors to the wheels, so that a small amount of misalignment could be accommodated.
To power the bot, we decided to use two 18V cordless drill motors, knowing that this had been a popular choice with other builders. One of the advantages of using cordless drill motors is that they typically come with their own batteries and chargers.
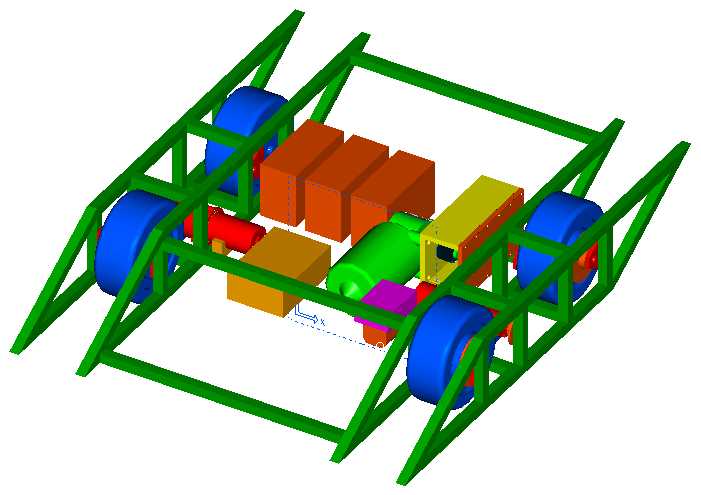
A CAD model was created using the appropriate sizing to optimize positioning of the components and the overall size of the bot.